机动手作为机器人的末端实行器,由于其良好的灵巧性和操作能力得到研究者们的广泛关注。通过概览近期IEEE ROBOTICS AND AUTOMATION LETTERS(RAL)、INTERNATIONAL JOURNAL OF ROBOTICS RESEARCH(IJRR)等揭橥的研究事情,我们总结了目前的机动手的紧张研究方向,包括:机动手操作能力的优化、构造的创新、传感器性能的提升等。
1)机动手构造的优化
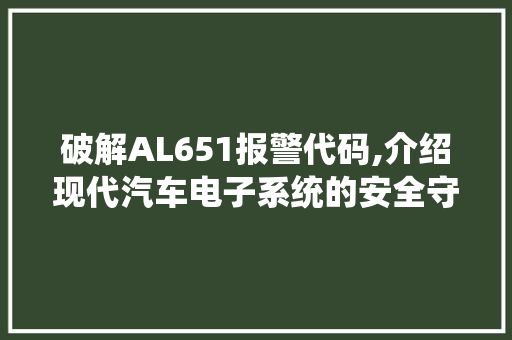
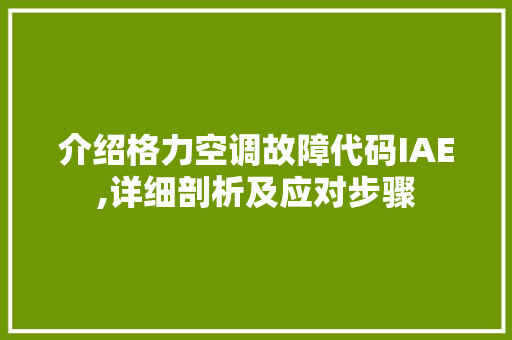
喷鼻香港城市大学和喷鼻香港大学的研究者们在调研了人手指解剖学的理论的条件下,提出了一种新型的、合理的手指驱动构造[1]。这种构造可以实现指间枢纽关头和掌骨枢纽关头的独立运动,提高了机动手的操作能力。同时采取这种构造的手指在捏取物体时,DIP枢纽关头会自适应的波折,更加符合人手捏取物体时的动作。末了,采取这种构造研制的机动手可以完成33个静态的稳定抓取动作,验证了其灵巧性能。

图1. 机动手形状构造图及改良的中指构造示意图
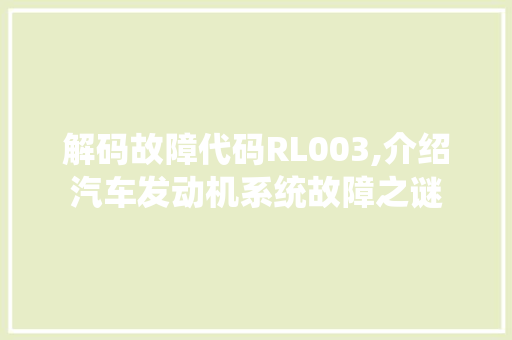
图2. 采取新型构造的机动手指动作示意图。
(a):从上到下依次显示CMC枢纽关头内收、外展、屈曲的拇指运动,
以及MCP枢纽关头的内旋、MCP枢纽关头的屈曲、IP枢纽关头的屈曲。
(b): IP枢纽关头的独立运动。
(c): MCP枢纽关头的独立运动。
(d):指尖对抗外力的过程。
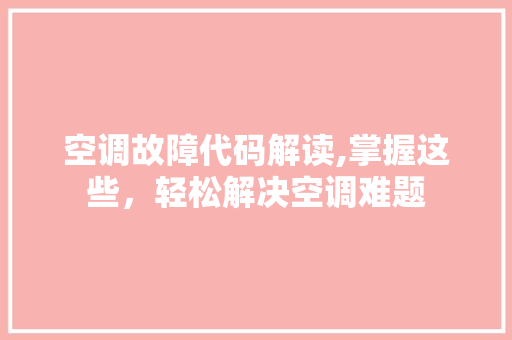
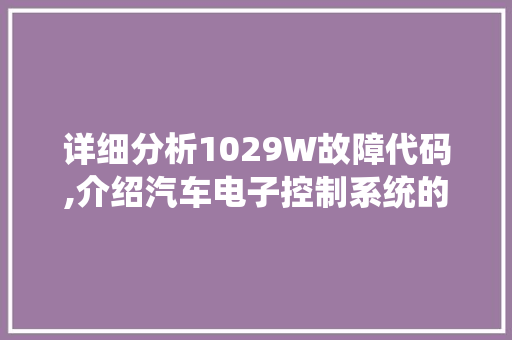
耶鲁大学的研究者们针对付手指表面的构造进行了优化[2],通过剖析人手指指尖构造,他们创造手指软组织被一层更坚硬的皮肤包围。这许可手指垫符合周围的物体轮廓,以稳固的抓取,同时大概可低摩擦滑动物体表面与轻触。这些不同的操作模式有助于实现手持操作的常见功能。因此,他们提出了一个大略的仿照人类的手指垫,通过一个机器手指与高摩擦和低摩擦表面实现。低摩擦面悬浮在弹性元件上,当施加足够的法向力(约1.2到2.5 N)时,低摩擦面凹进空腔内,露出高摩擦面。这样实现了一个可变摩擦力的手指构造,基于这种方法,演示了如何在不须要触觉感知、繁芜掌握方法的情形下实现物体的手内滚动和滑动。
图3. 被动可变摩擦手指的构造
2)机动手感知研究
对付机动手来说,触觉感知一贯是个关键的问题。在机动手实行任务时,触觉传感器能捕获到机动手与外界的打仗信息,基于对采集到的信息进行剖析,机动手可以实行一些繁芜的操作任务,如:物体姿态检测、滑觉检测等。传感器的性能直接决定了机动手的操作能力,因此一款好的传感器对付机动手来说非常主要。
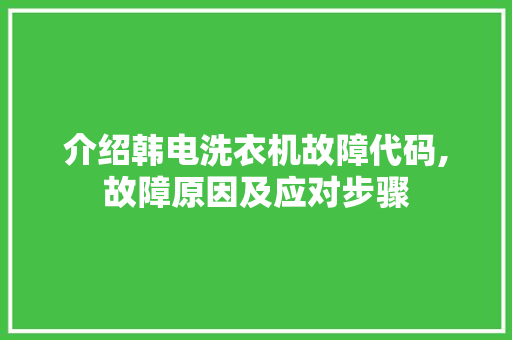
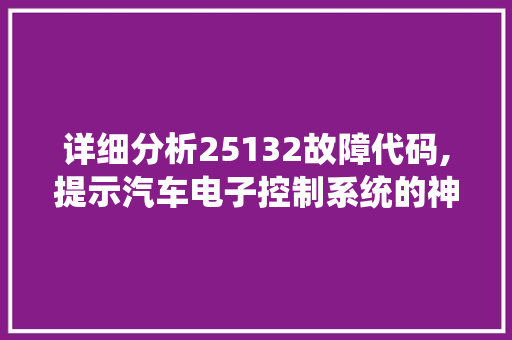
首尔大学的研究团队研制出了一种新型的Magnetic Synapse Sensor用于触觉反馈[3]。并且提出了具有磁性突触传感器的多枢纽关头机器人手指的综合设计方案。传感器灵敏度为0.016mV/kPa,传感范围为350 kPa。与高灵敏度传感器阵列集成的机器人手指可以抓取各种形状和顺应性的物体,而且不会对物品造成破坏。该传感器的优点是:远程触控头与磁性传感器在物理上是分离的,从而避免了电气连接问题,在末端实行器中不该用任何电气组件也担保了传感器可在水中等极度环境利用。同时手指采取了模块化设计,单元模块可以被组装和重新组装,以适应触觉传感器的更换和掩护,并办理了远程触摸头集成问题。
图4 触觉传感系统的远程触头
(a)带模具的弹性体膜
(b)组装的传感器单元
(c)传感器单元示意图
清华大学孙富春教授团队将一种新型的阵列式触觉传感器集成到一款12自由度的机动手上[4]。该传感器最大量程20N,尺寸为15mm15mm,可以在机动手指尖上较好的装置,并且在最后进行了抓取实验,传感器的性能较好,在迟滞性、重复性测试上都展示出较好的实验结果。同时所设计的机动手也展示出了较好的抓取性能,在稳固抓取和灵巧抓取实验中均取得了较好的抓取结果。
图5 机动手构造示意图(每个手指指尖均配有阵列触觉传感器)及抓取实验
韩国又松大学的研究者们授予了机动手识别物体的形状和软硬度的能力[5]。将深度学习与打算机视觉相结合,可以精确预测物体的形状和质地,从而进一步提高机器手的性能。机器手指尖上的触觉传感器可以通过剖析压力数据来预测被抓取物体的软硬度。根据物体的优柔度/硬度,可以很随意马虎地对机器手进行编程,使其在不破坏薄弱优柔物体的情形下进行操作。并且通过在手指和手掌的不同位置放置一个阵列式传感器,可以预测更广义的抓取力,从而可以准确地预测物体的优柔度和硬度。
图6 机器手抓取实验平台
3)机动操作研究进展
耶鲁大学的研究团队制订了一个通用性的框架[6],用于进行手-物体的构型估计。通过对抓取约束的建模,提出了一种基于粒子滤波的手构型估计框架。详细地说,对付任意的抓握办法,首先对一组手的构型进行采样,然后随机地操纵手内的物体。利用外部摄像机不雅观察物体的运动时,所设计的估计器司帐算每个枢纽关头角度的可能性来迭代地估计手的配置。一旦收敛,估计器将用于实时跟踪手的配置,以便将来进行操作。在此根本上,他们还开拓了一种算法来精确地方案和掌握欠驱动手的操作,从而将被抓取的工具调度到须要的姿态。与大多数其他机动的操作方法比较,他们提出的框架不须要任何触觉传感或联合编码器,可以直接操作任何新工具,而不须要一个工具的先验模型。终极结果表明,该方法对不同的目标具有较高的估计精度,可以很随意马虎地适应不同构造的手的模型。
图7 实验平台:顶部摄像头用于跟踪操控点的运动,侧边摄像头用于跟踪指尖位置
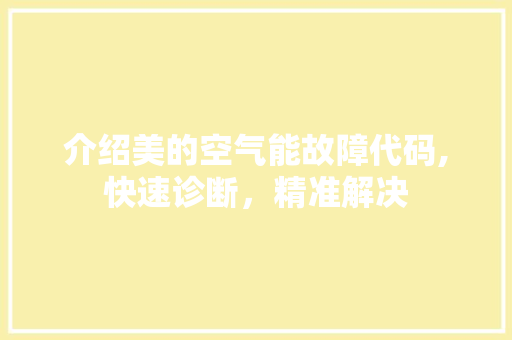
OpenAI团队利用强化学习(RL)来学习机动的手操纵策略[7],该策略可以在shadow hand上实行基于视觉的物体重新定位。他们采取虚拟环境进行演习,在这个环境中,随机化系统的许多物理属性,如摩擦系数和物体的外不雅观。以增加机器人的泛化能力。终极将演习好的模型迁移到现实环境下,真实物理环境下的shadow hand表现出了良好的操作能力。证明了用RL在虚拟环境中演习的手部操作技能可以达到一个前所未有的机动水平。
图8 用强化学习演习好的机动手,利用视觉感知将一个立方体从初始状态操作到目标状态
参考文献:
[1] Zhong Zhang, Tao Han, Jia Pan, ZhengWang. Design of Anthropomorphic Fingers With Biomimetic Actuation Mechanism. [J]IEEE Robotics and Automation Letters, 2019.
[2]Adam J. Spiers, Berk Calli, Aaron M. Dollar. Variable-Friction Finger Surfaces to Enable Within-Hand Manipulation via Gripping and Sliding. [J] IEEE Robotics and Automation Letters, 2018.[3]Sang-Hun K , Sunjong O , Bum K K , et al. Design of a Bioinspired Robotic Hand: Magnetic Synapse Sensor Integration for a Robust Remote Tactile Sensing[J].IEEE Robotics and Automation Letters, 2018.
[4]Bin Fang, Fuchun Sun, Yang Chen, Chang Zhu, Ziwei Xia, Yiyong Yang: A Tendon-Driven Dexterous Hand Design with Tactile Sensor Array for Grasping and Manipulation. ROBIO 2019: 203-210.
[5]Bhandari, Binayak, Lee, MinKyo. Haptic identification of objects using tactile sensing and computer vision. [J] Advance in Mechanical Engineering, 2019.
[6]Kaiyu Hang , Walter G. Bircher , Andrew S. Morgan , Aaron M. Dollar. Hand–object configuration estimation using particle filters for dexterous in-hand manipulation. [J] International Journal of Robotic Research, 2019.
[7]OpenAI, Andrychowicz M, Baker B, et al. Learning Dexterous In-HandManipulation[J]. International Journal of Robotic Research, 2019.
“CAAI认知系统与信息处理专委会” 2014年景立,每年组织中国科学热点论坛、机器人工程赛、人工智能热点研讨会等多项特色活动,成功召开了多届认知系统和信息处理国际会议(ICCSIP)。第五届认知系统和信息处理国际会议(ICCSIP 2020)将于2020年12月18-20号在中国珠海横琴岛召开,希望推动认知、生理、智能、机器人等领域的融通交汇。此外,还将特殊设立科技抗疫专题,欢迎各界人士依托此平台为环球科技抗疫贡献力量。
欢迎注册中国人工智能学会认知系统与信息处理专业委员会:
http://app01.cast.org.cn:7001/cast/reg.jsp?sid=E66
同时2019年创办了“Cognitive Computation and Systems”国际期刊,目前已经出版了四期,并正式被EI Compendex检索,且无需版面费。
期刊投稿网址:
http://digital-library.theiet.org/content/journals/ccs