\"大众 data-from=\公众0\"大众 data-is_biz_ban=\"大众0\"大众>
"大众年夜众号ID|ComputerVisionGzq
学习群|扫码在主页获取加入办法
论文地址:https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9521517

打算机视觉研究院专栏
作者:Edison_G
任意方向的目标检测是一项具有寻衅性的任务。
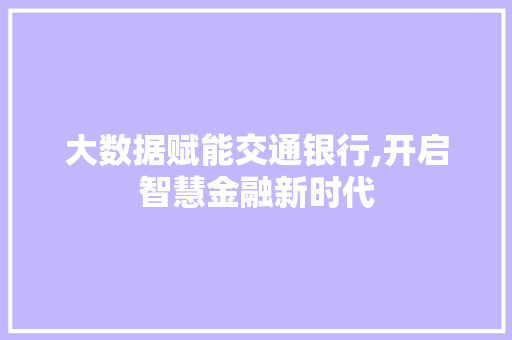
三、新框架
新提出的旋转检测器框架如上图所示。网络基于RetinaNet框架。图中标记为C2、C3、C4的特色图是由深度卷积神经网络提取的。该方法的总体步骤如下:首先利用特色提取网络对遥感图像中的特色进行提取,利用NAS-FPN对提取的特色进行领悟,得到不同尺度的特色图。然后,利用长界限说方法来表示旋转检测框,并在框回归任务中利用二进制编码标记技能将角度回归问题转化为角度分类问题。下面详细描述该方法中的一些主要构造。
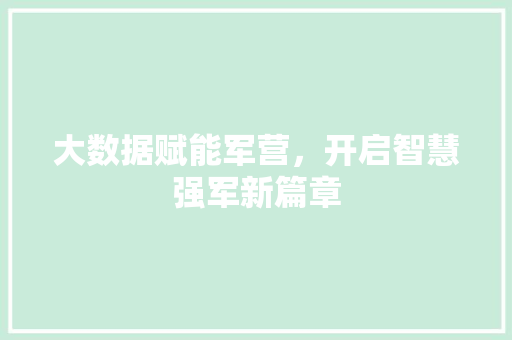
NAS-FPN
在NAS-FPN中,最主要的构造是由特色图节点凑集、操作池和搜索终止条件组成的合并单元构造。下图简要描述了特色图的搜索过程。
1)从特色图节点集中随机选择一个特色图作为输入之一。初始特色图节点集包含五个尺度的特色图,表示为 {C1,C2, C3, C4, C5}。
2)从特色图节点集中随机选择另一个特色图作为另一个输入。
3)选择输出特色图的分辨率。
4)在操作池中选择一个操为难刁难(1)(2)中选择的特色图节点进行操作,产生与输出特色图分辨率相同的特色图,并将该特色图加入到特色图节点凑集中选择。
5) 循环重复上述步骤。搜索的终止条件是天生五个与初始特色图分辨率相同的特色金字塔网络,记为{P1, P2, P3, P4, P5}。
ROTATION DETECTION FRAME
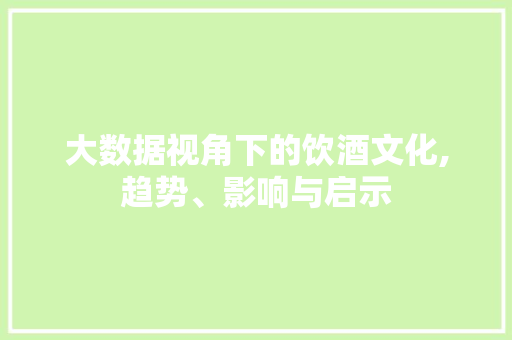
范例的角度编码方法有三种,包括两种不同角度范围的五参数方法和一种八参数方法。详细情形如下:
角度范围为90°的五参数法(OpenCV定义法):其示意图如上图所示。该定义法包含五个参数[x,y,w,h,θ]。个中,x和y为旋转坐标系的中央坐标,θ为旋转坐标系与x轴的锐角,逆时针方向指定为负角,因此角度范围为[−90° , 0); 旋转框的宽度w为旋转框所在的边角,旋转框的高度h为另一边。
180°角范围的五参数法
八参数法
八参数法:该定义方法示意图如上图所示,该定义方法包含8个参数[a1,a2,b1,b2,c1,c2,d1,d2], 定义的左上角为出发点,别的点按逆时针顺序排列。旋转坐标系的表示不限于上述三种方法,旋转坐标系别的部分的表示可以通过上述三种方法的变换得到。
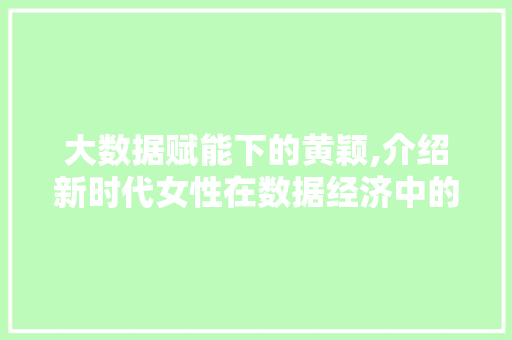
ANGLE CODING METHOD
90°范围的五参数定义方法的问题
八参数四边形定义方法的问题
角度编码方法:
四、实验及可视化
实验环境
DOTA数据集上的性能比较
END
转载请联系本公众年夜众号得到授权
打算机视觉研究院学习群等你加入!
ABOUT
打算机视觉研究院
?